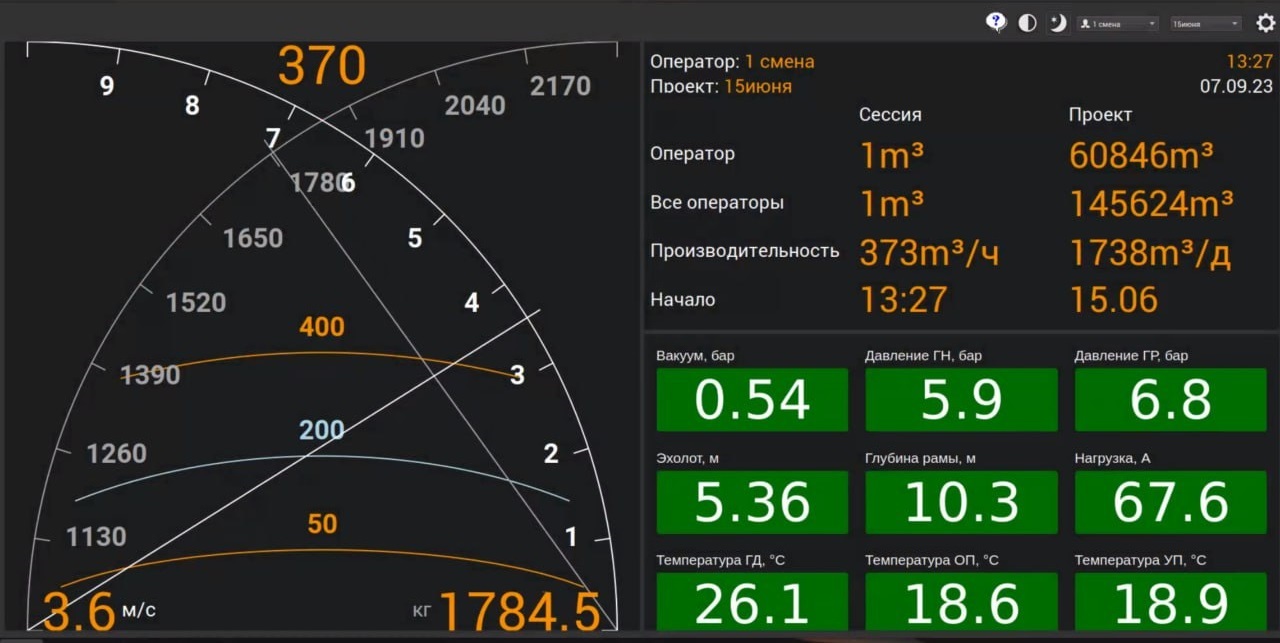








Автоматическая система грунтозабора Nonius DredgeControl – это комплексное решение, позволяющее на 25% повысить эффективность земснаряда землесосного типа.
Комплекс включает в себя три части:
– блок автоматического управления грунтозаборным устройством;
– блок учета производительности;
– блок трехмерного позиционирования.
Nonius DredgeControl будет полезен для земснарядов, которые работают на добыче песка, для ГОКов, крупных производств с хвостохранилищами, так и для компаний дноуглубительной отрасли.