




Nonius Grab – это трехмерная система позиционирования и мониторинга для грейферных земснарядов и плавкранов.
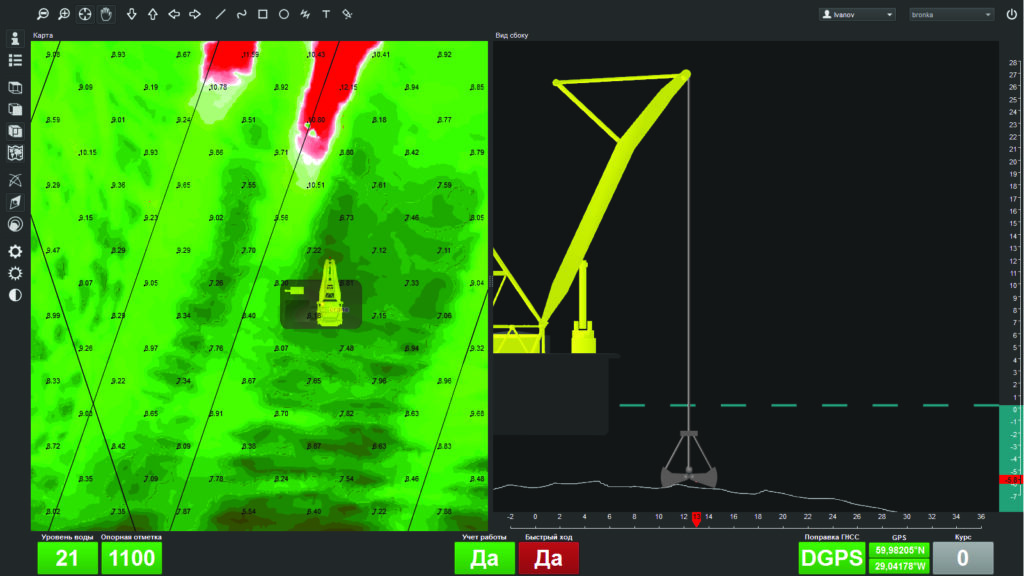
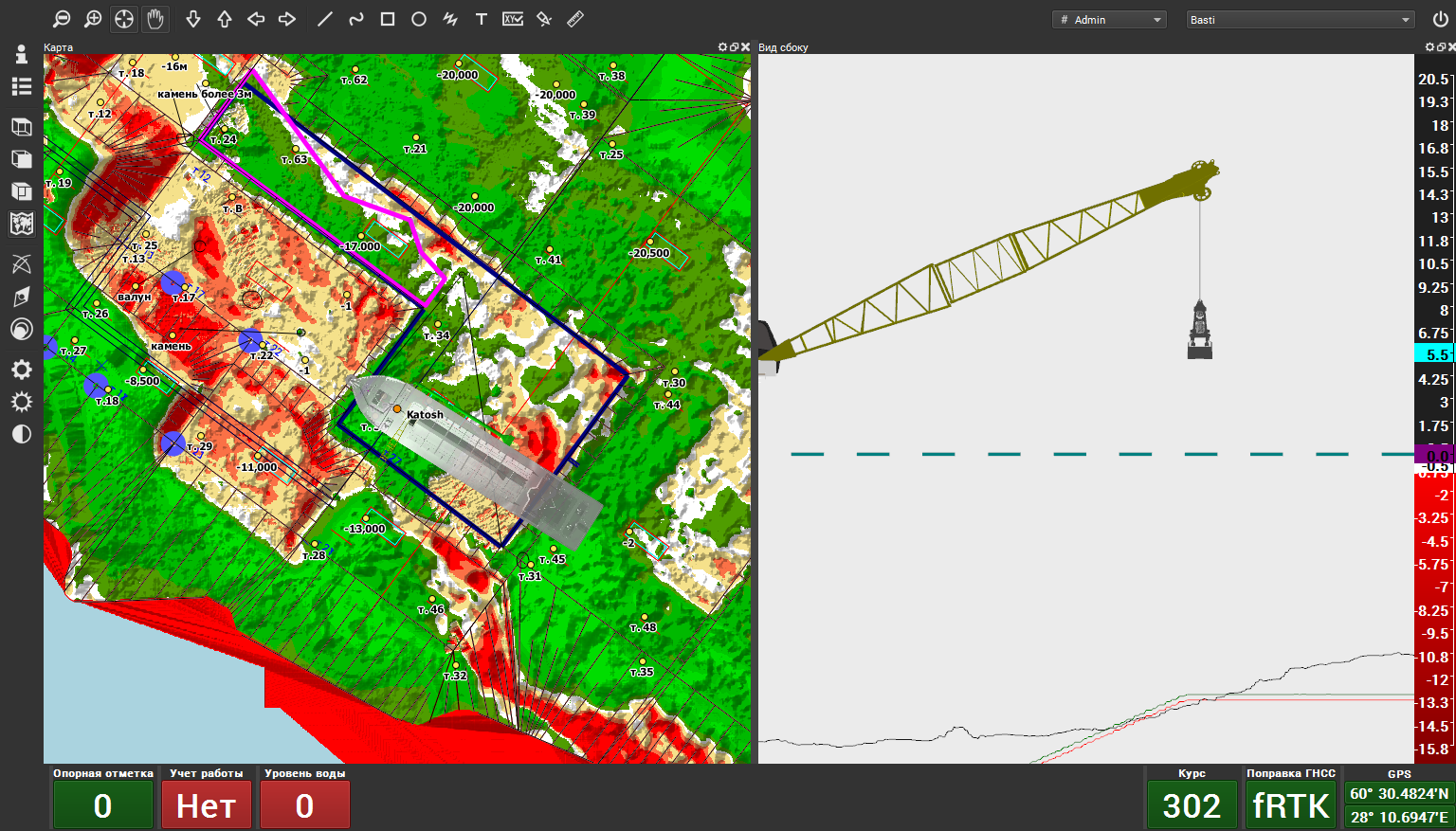
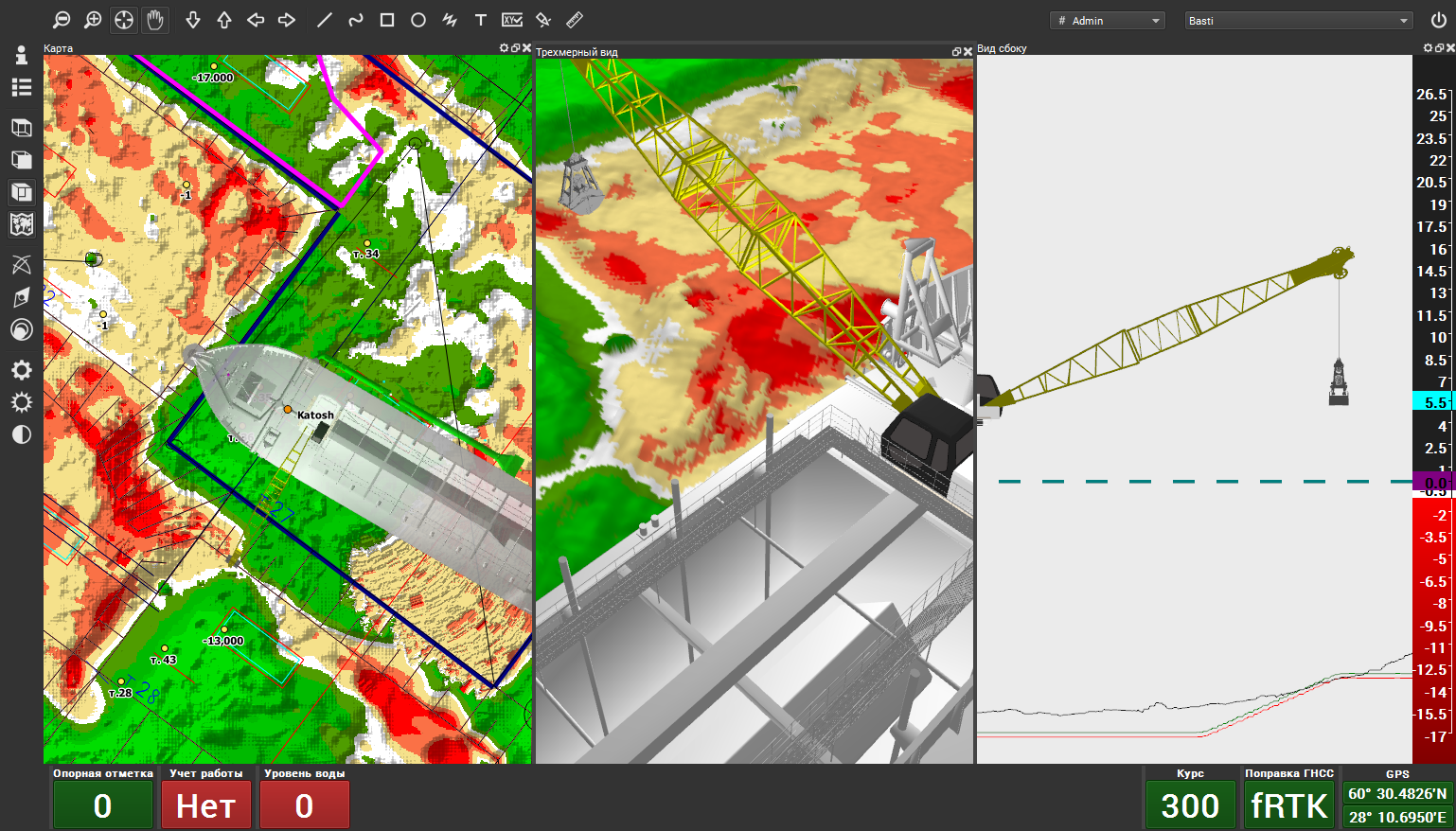
Система для плавкранов любого типа позволяет значительно повысить эффективность дноуглубительных работ. Оператор земснаряда (багермейстер) имеет возможность видеть положение земснаряда относительно карты глубин, положение грунтозаборного устройства относительно рельефа дна, проектной глубины и проектных границ. Кроме того, оператор всегда может определить, на каких участках производились работы, а на каких еще нет.
Система Nonius Grab подходит для установки на грейферные земснаряды, плавкраны и краны на понтонах.